Projects
-
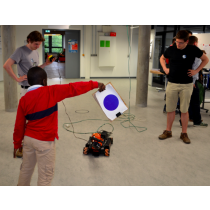
kuk-A-droid project
Kuk-A-droid is a human-robot interaction (HRI) project. The project's focus is to design what would -
BRICS: BEST PRACTICE IN ROBOTICS
BRICS: The prime objective of BRICS was to structure and formalize the robot development process its -

Developing a remote lab using the youBot platform
The Robot Autonomy and Interactive Learning lab at Worcester Polytechnic Institute is in the process -

Torque Control of a KUKA youBot Arm
This is a master thesis project description on torque control of a KUKA youBot arm -
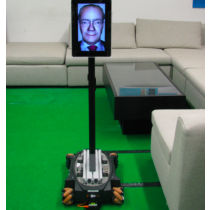
EmoRobot: Telepresence
The youBot is currently used as a telepresence assitive device in the German research project EmoRob -

HRI for teaching mobile manipulation tasks
This is a master thesis on HRI for teaching mobile manipulation tasks by demonstration and imitation -
Operational space control for the KUKA youBot
The Robotics and Biology Laboratory, TU Berlin developed and implemented operational space control f -
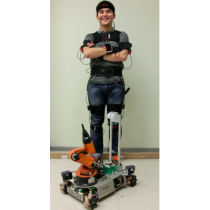
Inertial motion capture based tele-operation of a mobile robot manipulator
Main objective of the project is to develop an intuitive, effective and easy-to-use inertial motion -
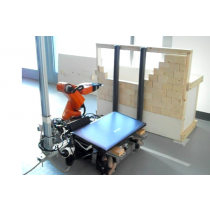
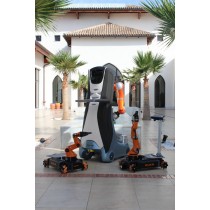
Toward Autonomous Robots for Demolitions in Unstructured Environments
Pilot project aimed at laying the groundwork for the development of full-size autonomous and semi-au