Projects
-

Development of control strategies for a precise positioning
Project on the development of control strategies for precise positioning of a KUKA youBot robot -

IKEA Furniture Assembly
The goal of this project is to enable a team of youBots to autonomously assemble IKEA furniture. -
Echord EduFill project
EduFill's goal is to foster the use of advanced (mobile) manipulation techniques in small and mid-si -
OmniaRoboCare
KUKA youBot is adapted to fit in domestic environments and help support (elderly) people living inde -
ultrasound based indoor localization system for the youBot
The Sapientia Hungarian University of Transylvania developed an ultrasound based indoor localization -
youBot and BCI integration
PERCRO lab is working on the integration of robotic manipulators with brain-computer-interfaces -

OpenBionics end effector for youBot
OpenBionics have designed an end effector for the KUKA youBot. -
SEAMLESS - Simultaneous navigation and manipulation in complex dynamic scenes
Parallel DRM (PDRM), developed in the strategic project SEAMLESS at SINTEF ICT, is a new global moti -

Novel inverse kinematics and continuous trajectory planning in the Cartesian space
Project on novel inverse kinematics and continuous trajectory planning in the Cartesian space -
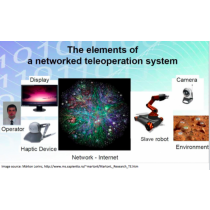
Reconfigurable Control of Robotics Systems over Networks
The project aims at developing control algorithms, trajectory generation algorithms and real-time co -

Safe control of mobile robots for productive industrial operations
The main goal of the SCORPION project is to develop a planning, control and perception framework tha -

A Monocular Pose Estimation System based on Infrared LEDs
The monocular pose estimation system allows accurate, efficient and robust estimation of the relativ